


Project information
- Role: Mechanical Design and Operator
- Project date: Oct 2022 - Dec 2022
- Skills: Servo control, gear train design, testing and calibration
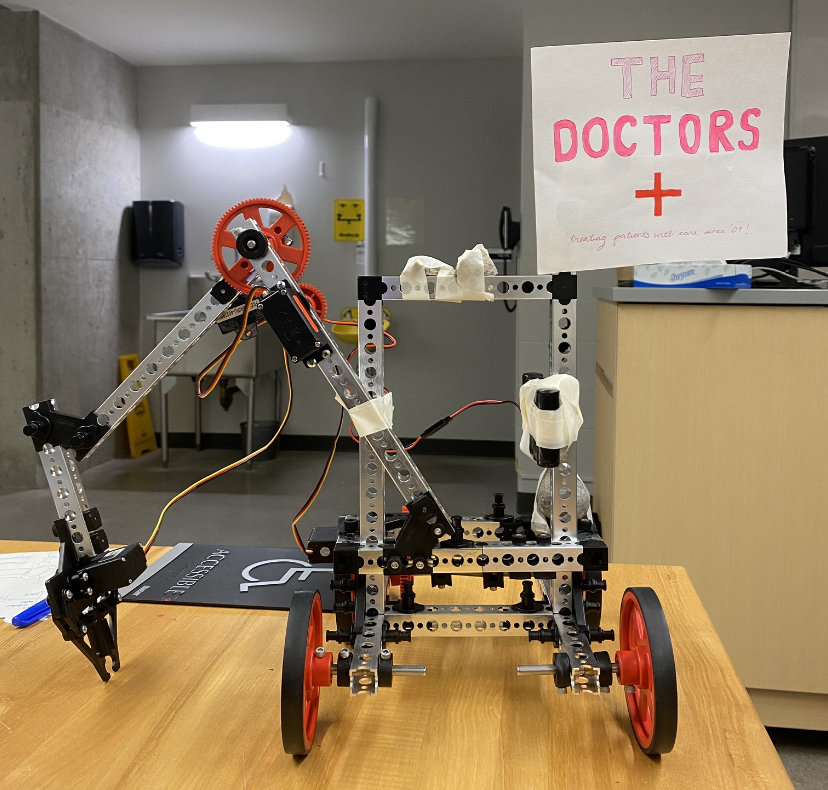
Triple-Axis Robotic Arm
Designed a robotic arm to simulate a medical assistant capable of transporting bone fragments 3-10 cm long. We controlled the precise movement and lifting cabilities by a combination of servos and gear trains.